
Servo Motor – Types, Construction, Working, Controlling & Applications

What is Servo Motor?
Servo is an electromagnetic device uses a negative feedback mechanism to converts an electric signal into controlled motion. Basically, servos behave like as actuators which provide precise control over velocity, acceleration, and linear or angular position. It consists of four things: DC motor, position sensor, gear train, and a control circuit. The gear mechanism connected with the motor provides the feedback to the position sensor.
If the motor of the servo is operated by DC then it is called a DC servo motor and if it is operated by AC then it is called as AC servo motor. The gear of the servo motor is generally made up of plastic but in high power servos, it is made up of metal.Servo motors being manufactured by many companies some of them are FUTABA, HITECH, AIRTRONICS, and JR RADIOS. They are the same in manufacturing but different in connector type, wire colors, etc. There are numbers of types of servos are available in the market, AC, DC, continuous, positional and linear servo motor.
Types of Servo Motors
On the Basis of Rotation
- Positional Rotation Servos: Positional servos can rotate the shaft in about half of the circle. Also, it has the feature to protect the rotational sensor from over-rotating. Positional servos are mainly used in limbs, robotic arms, and in many other places.
- Continuous Rotation Servos: Continous servos are similar in construction to the positional servo. But, it can move in both clockwise and anticlockwise directions. These types of servos are used in radar systems and robots.
- Linear Servos: Again linear servos are also like a positional servo, but with additional gears to the adjust the output from circular to back-and-forth. These type of servos are used in high model airplanes and are rare to find on the stores.
On the Basis of Operating Signal
There are also two types of servo motors used which differ in processing information and signal.
- Analog Servomotors
Analog servos are operated over PWM (Pulse Width Modulation) signals. And, the range of the signal is 4.8V to 6V. In this type of servo, the PWM is off when the servo is at rest. The torque produced at rest time makes the starting time inactive. Also, an analog servo can be able to send 50 pulses per seconds only.
- Digital Servomotors
Using small microprocessors Digital Servo receives signal and acts at high-frequency voltage pulses. A digital servo can be able to send 300 pulses per seconds, which is very high in comparison to an analog servo. Digital servo gives a smooth response and consistent torque, due to faster pulse. Digital servos consume more power than an analog servo.
- Related Post: Cable Size Calculation for LT & HT Motors

On the Basis of Operating Power
- DC Servo Motor
DC Servos are used for providing fast torque response and are also known as a permanent magnet DC motor or separately excited DC motor. The reason behind providing fast torque response is because of the torque and flus are decoupled. Thus, a small variation in the armature voltage or current can produce a notable shift in the position or speed of the shaft. DC servos are most used servo motors among all the types.
- AC Servo Motor
There are two types of AC servo motors one is 2 phase and the second is 3 phase. Mainly two-phase squirrel cage servo motor is used for low power applications. And, three-phase squirrel cage servo is used for high power systems.
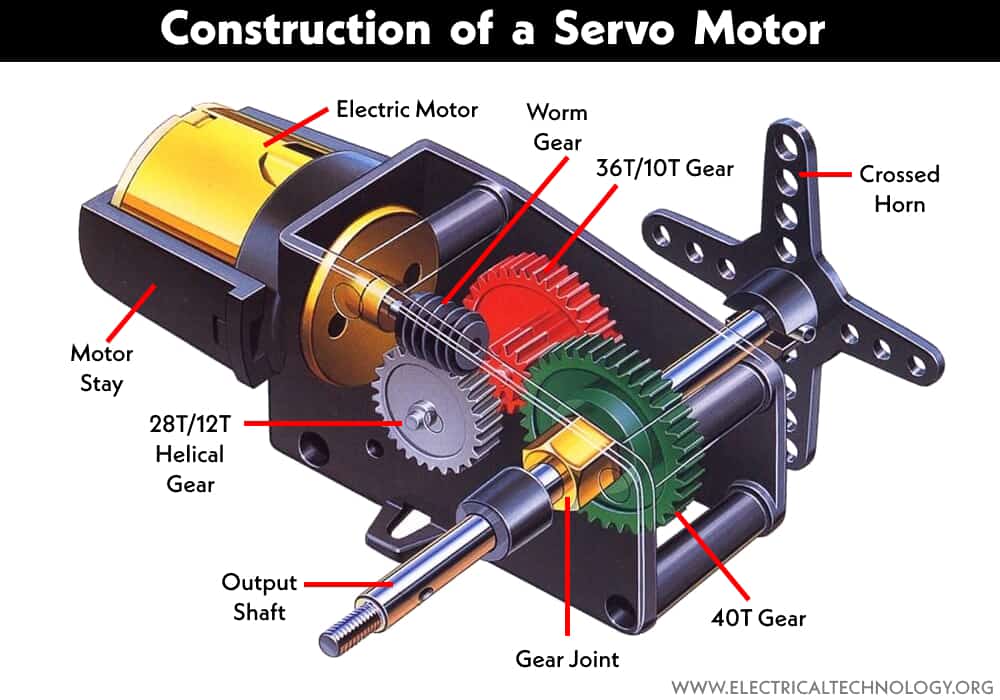
Construction of Servo Motor
The Servo motor is DC motor which has 5 following parts:-
- Stator Winding: This type of winding wound on the stationary part of the motor. It is also known as field winding of the motor.
- Rotor Winding: This type of winding wound on the rotating part of the motor. It is also known as an armature winding of the motor.
- Bearing: These are of two types,i.e, font bearing and back bearing which are used for the movement of the shaft.
- Shaft: The armature winding is coupled on the iron rod is known as the shaft of the motor.
- Encoder: It has the approximate sensor which determines the rotational speed of motor and revolution per minute of the motor.
Mechanism of Servo Motor
It consists of three basic types:
- Controlling Device
- Output Sensor
- Feedback system
The servo motor works on the phenomenon of the automatic closed-loop system. The controller is required for this closed-loop system. This controller is composed of a comparator and a feedback path. It has one output and two inputs. In this, for producing an output signal, the comparator is used to compare the required reference signal and this output signal is sensed by the sensor. The input signal for the motor is termed as a feedback signal. On the basis of the feedback signal, the motor starts working. Comparator signal is called a logic signal of the motor. The motor would be ON for the desired time when the logical difference is higher and the motor would be OFF for the desired time when the logical difference is lower. Basically, a comparator is used to decide that motor would be ON or OFF. Proper functioning of the motor can be done with the help of a good controller.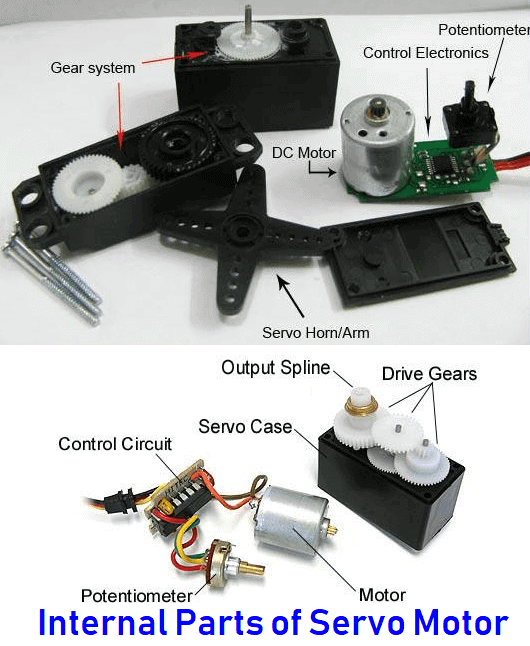
Controlling of Servo Motor:
The servo motors can be controlled by the method PWM i.e., Pulse Width Modulation. These send electric signals of inconsistent width to the motor. The width pulse is varied in the range of 1 millisecond to 2 milliseconds and transfer this to the servo motors with repeating 50 times in a second. The width of the pulse controls the angular position of the rotating shaft. In this, three terms are used which shows the controlling of the servomotor i.e., a maximum pulse, minimum pulse and repetition rate.
For example, The servo moves with the pulse of 1 millisecond to turn motor towards 0˚ whereas a pulse of 2 milliseconds to turn motor towards 180˚ Between the angular positions, the pulse width interchange by itself. Therefore, the servo turns to the 90˚ with the pulse of width 1.5 milliseconds.

There are three wires or leads in every servo motors. The two wires used from positive supply and ground supply whereas the third wire is used to control the signal.

Working of Servo Motors
The servo has a position sensor, a DC motor, a gear system, a control circuit. The DC motor run at high speed and low torque when getting power from a battery. This speed is lower and torque will be higher than gear and shaft assembly connected to DC motors. The position of shaft senses by position sensor from its definite position and supply information to the control circuit. The signal is decoded by the control circuit from the position sensor and handles the direction of rotation to get the correct position. It needs a DC supply of 4.8 V to 6 V.
The reduction gearbox is connected to a shaft which decreases the RPM of the motor. The output shaft of the reduction gearbox is the same as of motor which is connected with encoder or potentiometer. The output of the encoder is then connected to the control circuit. The wires of the servomotor are also connected to the control circuit. The motor control through microcontroller by sending signals in the form of PWM which decodes the control circuit to rotate the motor in required angle the control circuit moves the motor in a clockwise or anticlockwise direction, with this the shaft also rotates in the desired direction. the encoder sends the feedback signal to the control circuit. When the motor reaches to required angle, the control circuit stops motor accordingly with the received signals from an encoder.
For example., if the motor is at 30˚and microcontroller gives angle 60˚ to the motor then control circuit rotates the motor in a clockwise direction. When the motor reaches 60˚, the encoder sends a signal to the control circuit to stop the motor.
Applications of Servo Motors
Here are some applications used to control speed when the servo is overheaded or over rotating:
- They are used to control the positioning and movement of elevators in radio controlled airplanes
- They play an important role in robotics information of robot because of their smooth switching on or off and accurate positioning.
- They are used in hydraulic systems to maintain hydraulic fluid in the aerospace industry.
- In radio controlled toys these are also used.
- They are used to extend or replay the disc trays in electronic devices such as DVDs or Blue-ray Disc players.
- They are used to maintain the speed of vehicles in the automobile industries.
Advantages & Disadvantages of Servo Motors
Advantages:
- The driver will increase the current to the motor coil when we place a heavy load on the motor as it attempts to rotate the motor.
- In servo motor, the High-speed operation will be possible.
Disadvantages:
- The cost will be higher.
- The servo motor is not suitable for precision control of rotation because the servo motor is trying to rotate according to the command pulses, but lags behind.





0 Comments